



Les robots peuvent ramasser des cartons, trier des colis et visser des boulons sans transpirer. Certains d’entre eux peuvent même marcher et courir comme des humains. Cependant, donnez-en un morceau de saumon cru souple et glissant et tout commence à s'effondrer.
Une équipe de l’Université norvégienne des sciences et technologies a entrepris de résoudre ce problème. Le résultat est le Sashimi-Bot, un robot à trois bras capable de préparer des sashimis à partir d'une longe de saumon cru sans chef en vue.
Alors, comment fonctionne réellement le Sashimi-Bot ?
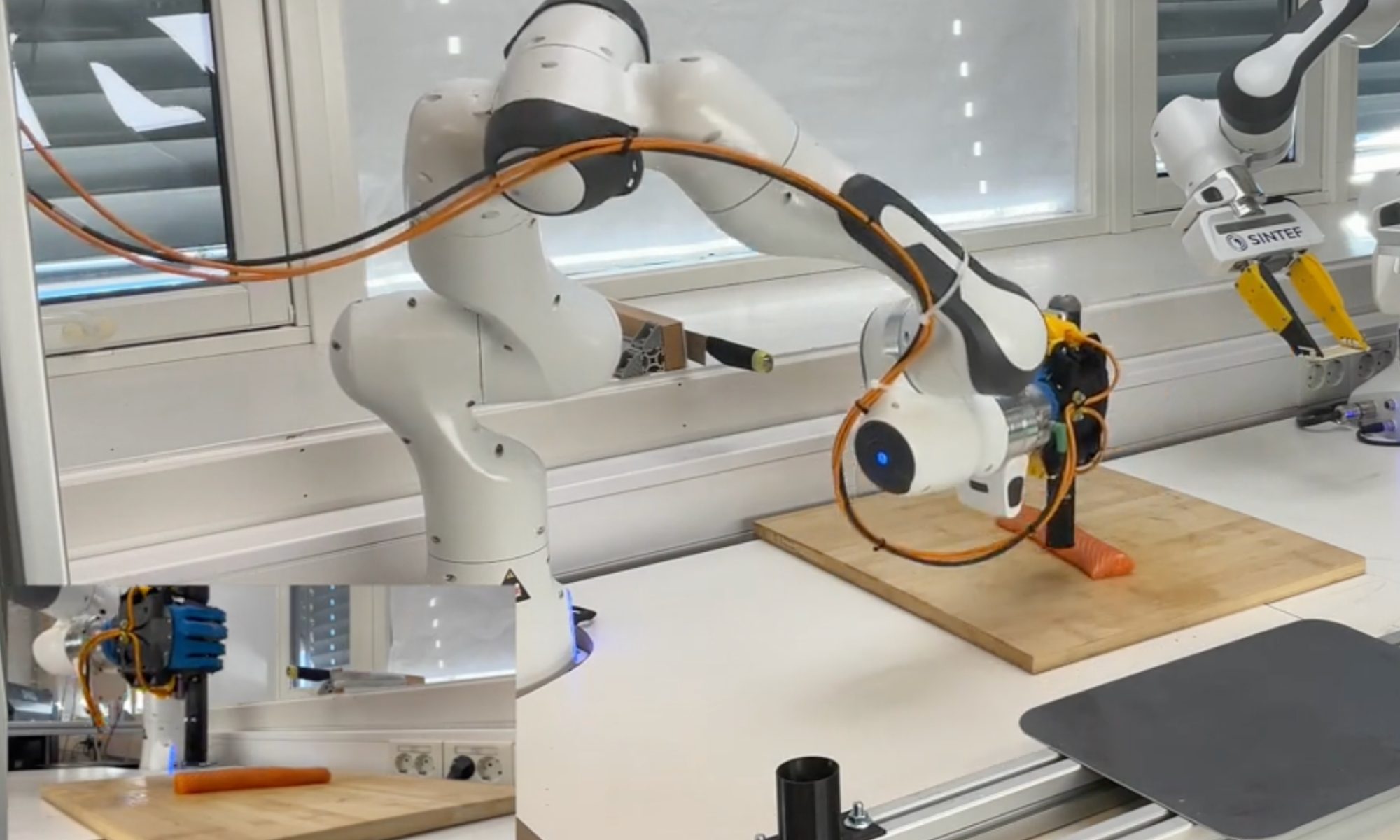
Il répartit soigneusement le travail entre ses trois bras. Le premier bras stabilise et positionne le saumon sur la planche à découper. Le second tient un couteau de chef et tranche. Le troisième ramasse chaque tranche finie avec des baguettes et la transfère sur un plateau de service.
Ce qui fait que cela est plus qu'un simple agencement intelligent des bras, c'est la façon dont le robot a appris à le faire. Le chercheur principal Sverre Herland et l’équipe l’ont formé en utilisant un apprentissage par renforcement profond dans une simulation virtuelle.
La technologie permet au robot de pratiquer des milliers de mouvements et d’apprendre par essais et erreurs, sans aucune pratique sur de vrais poissons.
Est-ce que ça tient vraiment le coup ?
Le bras du couteau est également équipé d'un capteur tactile GelSight, une surface en gel souple avec une caméra intégrée qui indique au robot exactement quand il a atteint la planche à découper.
Lors des tests, le robot a coupé 34 tranches de saumon. Il a réussi à saisir 26 des 28 tranches tombées sur la planche à découper avec des baguettes. Six tranches supplémentaires collées à la lame du couteau en ont été récupérées directement.
Chaque cycle de coupe durait en moyenne 27,9 secondes. L'étude est publiée dans npj Robotics (via TechXplore). Alors que la plupart des robots réussissent mieux avec des objets rigides et prévisibles, le Sashimi-Bot est plus important que ne le suggère son application culinaire.
Il s'agit d'un exemple de robots manipulant des matériaux délicats et irréguliers en effectuant des mouvements et des ajustements en temps réel.


